

電子齒輪
目錄
在運動控制系統中,電子齒輪的實現方式是用電氣控制技術來代替機械傳動機構,通過軟件的方法實現機械齒輪速比的調節功能,圖1為電子齒輪的機械模型。

圖1 電子齒輪機械模型
根據傳動比,離合區的不同,主軸帶動從軸運動。上位機向伺服系統(運動控制器)發出位置指令,位置指令脈沖有3種形式,如圖1.1.1為位置指令脈沖示意圖。
① 脈沖+方向
② CW脈沖+CCW脈沖(正脈沖+負脈沖)
③ 正交兩相脈沖
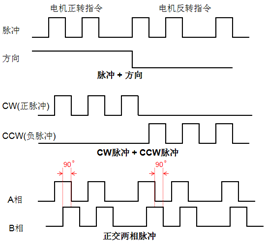
圖1.1.1 位置指令脈沖示意圖
位置指令脈沖包含電機的位移和方向兩個方面,伺服系統的位置反饋脈沖當量(控制器輸出一個定位控制脈沖時,所產生的定位控制移動的位移)由檢測器(如光電脈沖編碼器)的分辨率,以及電機每轉對應的機械位移量等決定。當指令脈沖單位與位置反饋脈沖當量不一致時,就可以使用電子齒輪使二者完全匹配。
① 可以大大地簡化機械設計,實現多個運動軸按設定的齒輪比同步運動;
② 實現一個運動軸以設定的齒輪比跟隨一個函數,而這個函數由其他的幾個運動軸的運動決定,一個軸也可以以設定的比例跟隨其他兩個軸的合成速度;
③ 電子齒輪可以任意決定一個輸入脈沖所相當的電機位移量,實現無極調速,提高系統的柔性,運行更加平穩;
④ 在電機啟動和停止時,可防止失步和過沖現象;
⑤ 電子齒輪的轉動軸分為主軸和從軸,從軸又可看做主軸,主軸帶動從軸,從軸只能跟隨主軸運動,反之不可;
可以使用同一控制器上任意軸作為主軸。如圖2.1.1為GCN400A控制器,其他控制器同樣方式,紅色區域內可選任意軸作主軸,其他都作為主軸的從軸。
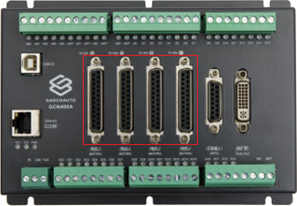
圖2.2.1 GCN400A控制器
通過GCS.exe工具對電子齒輪的使用配置進行詳細說明。GCS.exe工具連接控制器后,點擊功能->電子齒輪,同時打開兩個測試軸1和2,如圖2.2.1電子齒輪模擬測試。

圖2.2.1 電子齒輪模擬測試
在圖2.2.1中,Gear 運動模式(電子齒輪運動模式)設置了電機2為從軸,電機1為主軸,主軸類型(規劃位置、實際位置、編碼器位置)可選,一般默認規劃位置;跟隨方向(雙向、正向、負向)可選,一般默認雙向;傳動比主軸位移(設置主軸移動位移);傳動比從軸位移(設置主軸移動位移);傳動比主軸位移和傳動比從軸位移之比為傳動比,傳動比(在機械傳動系統中,其始端主動輪與末端從動輪的角速度或轉速的比值,就是設置主軸和從軸的位移比值的)可以隨時修改;離合區位移(必須大于0,同時不能等于1)可以改變傳動比的數據變化,從而讓跟隨過程更加平滑,離合區越大,則同步過程越平滑;如圖2.2.2為電子齒輪主從軸速度曲線,曲線1為主軸速度曲線,曲線2為傳動比5:1從軸速度曲線,曲線3為傳動比5:2從軸速度曲線,曲線4為傳動比5:4從軸速度曲線,曲線5區域為離合區。
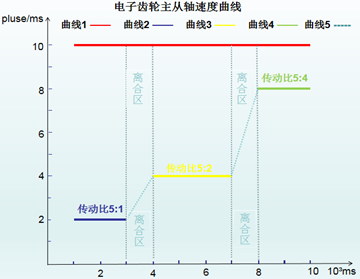
圖2.2.2 電子齒輪主從軸速度曲線
當多個從軸跟隨同一個主軸,從軸作為其他軸的主軸,如圖2.2.3從軸電機作為主軸被跟隨運動,電機1為電機2和電機3的主軸,電機2為電機3的主軸,根據傳動比不同,電機移動的位移也就不同。

圖2.2.3從軸作為主軸被跟隨運動
以下為電子齒輪常用功能函數的詳細說明。
電子齒輪
函數原形 | 函數說明 |
設置Gear跟隨方向 | |
獲取Gear跟隨方向 | |
設置Gear主軸參數 | |
獲取Gear主軸參數 | |
設置Gear跟隨倍率 | |
獲取Gear跟隨倍率 | |
啟動Gear運動 |
(1)設置單軸運動速度曲線類型
NMC_MtSetPrfMode( HAND axisHandle, short mode );
參數 | 輸入/輸出 | 描述 |
axisHandle | 輸入 | 軸句柄 |
mode | 輸入 | 各軸的規劃模式 #define MT_NONE_PRF_MODE (-1) // 無效 #define MT_PTP_PRF_MODE (0) // 梯形規劃 #define MT_JOG_PRF_MODE (1) // 連續速度模式 #define MT_CRD_PRF_MODE (3) // 坐標系 #define MT_GANTRY_MODE (4) // 龍門跟隨模式 #define MT_PT_PRF_MODE (5) // PT模式 #define MT_MULTI_LINE_MODE (6) // 多軸直線插補 #define MT_GEAR_PRF_MODE (7) // 電子齒輪模式 #define MT_FOLLOW_PRF_MODE (8) // Follow跟隨模式 注意:坐標系模式不需要通過NMC_MtSetPrfMode設置 |
(2)設置 Gear 跟隨方向
NMC_MtGearSetDir(HAND axisHandle, short dir);
參數 | 輸入/輸出 | 描述 |
axisHandle | 輸入 | 從軸句柄 |
dir | 輸入 | 雙向跟隨:=0; 正向跟隨:>0; 負向跟隨:<0;< span=""> |
(3)獲取 Gear 跟隨方向
NMC_MtGearGetDir(HAND axisHandle, short* pdir);
參數 | 輸入/輸出 | 描述 |
axisHandle | 輸入 | 從軸句柄 |
pdir | 輸出 | 雙向跟隨:=0; 正向跟隨:>0; 負向跟隨:<0;< span=""> |
(4)設置 Gear 主軸參數
NMC_MtGearSetMaster(HAND axisHandle, short masterNo, short masterType);
參數 | 輸入/輸出 | 描述 |
axisHandle | 輸入 | 從軸句柄 |
masterNo | 輸入 | 主軸序列號:0 ~ N; |
masterType | 輸入 | 主軸類型 AXIS規劃值:1; AXIS反饋值:2; 編碼器值: 3; |
(5)獲取 Gear 主軸參數
NNMC_MtGearGetMaster(HAND axisHandle, short * pmasterNo, short * pmasterType);
參數 | 輸入/輸出 | 描述 |
axisHandle | 輸入 | 從軸句柄 |
pmasterNo | 輸出 | 主軸序列號:0 ~ N |
pmasterType | 輸出 | 主軸類型 AXIS規劃值:1; AXIS反饋值:2; 編碼器值: 3; |
(6)設置Gear跟隨倍率
NMC_MtGearSetRatio(HAND axisHandle, long masterEven, long slaveEven, long masterSlope);
參數 | 輸入/輸出 | 描述 |
axisHandle | 輸入 | 從軸句柄 |
masterEven | 輸入 | 傳動比系數:主軸位移 |
slaveEven | 輸入 | 傳動比系數:從軸位移 |
masterSlope | 輸入 | 離合區位移:必須大于0,同時不能等于1 |
(7)獲取Gear跟隨倍率
NMC_MtGearGetRatio(HAND axisHandle, long *pMasterEven, long *pSlaveEven,long *pMasterSlope);
參數 | 輸入/輸出 | 描述 |
axisHandle | 輸入 | 從軸句柄 |
pMasterEven | 輸出 | 傳動比系數:主軸位移 |
pSlaveEven | 輸出 | 傳動比系數:從軸位移 |
pMasterSlope | 輸出 | 離合區位移:必須大于0,同時不能等于1 |
(8)啟動Gear運動
NMC_MtGearStartMtn(HAND axisHandle, short syncAxCnts, short *pSyncAxArray);
參數 | 輸入/輸出 | 描述 |
axisHandle | 輸入 | 從軸句柄 |
syncAxCnts | 輸入 | 不包括axisHandle 的其他同步啟動軸數量 |
pSyncAxArray | 輸入 | 其他同步啟動軸的序號:0 ~ N |
/*********此處省略控制器初始化部分***********/
//函數返回值錯誤 #define RTN_ERR {if(rtn != RTN_CMD_SUCCESS){ return;}}
short rtn = 0; //設置軸二的運動模式為電子齒輪模式 rtn = NMC_MtSetPrfMode(axishandle[1],MT_GEAR_PRF_MODE); RTN_ERR //設置雙向跟隨 rtn = NMC_MtGearSetDir(axishandle[1],0); RTN_ERR //設置跟隨軸一的規劃器 rtn = NMC_MtGearSetMaster(axishandle[1],0,1); RTN_ERR //設置傳動比5:4和離合區 rtn = NMC_MtGearSetRatio(axishandle[1],5,4,2000); RTN_ERR //啟動電子齒輪運動,當主軸運動時,從軸將按照設置的傳動比和離合區運動,運動過程中調用NMC_MtGearSetRatio可更新傳動比和離合區參數 rtn=NMC_MtGearStartMtn(axishandle[1],0,0); RTN_ERR return rtn; |
① 將電子齒輪先設成1:1,為消除反向間隙的影響,確定待運動的方向后,先沿此方向運動一定的距離(如2毫米);
② 坐標、狀態清零,或使用設定值(如1000毫米)的運動。沿剛才的方向單向移動一個距離(如1000毫米),此距離應足夠大(理論上越大越精確);
③ 修改電子齒輪值后,校核運動精度,如果滿足精度要求,則記下此數值,以備丟失時使用。如果誤差過大,則重復此操作,或對上述值進行修正。注:對于使用伺服電機的用戶建議更改伺服驅動器的電子齒輪,而將系統的電子齒輪設置為1:1;
④ 電子齒輪一般應使分子(主動軸)小于等于分母(從動軸),不要分子大于分母;
⑤ 如果使用交流伺服,盡量將控制系統的電子齒輪設置為1,而改變伺服驅動器的電子齒輪設置;
⑥ 電子齒輪的分子、分母均不能為零、負數或小數;
⑦ 電子齒輪可對絲杠、齒條的線性誤差進行線性的補償;
⑧ 系統的電子齒輪可與步進驅動器的細分數、伺服電機的電子齒輪結合在一起修改。從而保證電子齒輪的比不超過1。總之,系統以設定的高速運行時,其輸出的高頻率應<150khz。否則將出現不準確的現象;< span="">
⑨ 當使用步進電機,且電子齒輪比為1:1時,系統運動過程中的振動、噪音將降低,否則有可能出現一定的振動或噪音;
⑩ 電子齒輪比的倒數為脈沖當量:系統發出一個脈,機械實際運動的距離(單位:微米);
11 在函數中,有三種編程對象,對于單軸控制的指令是以 NMC_Mt 開頭,對于坐標系的指令是以NMC_Crd 開頭,其余是對控制器的指令;
12 文檔只挑選常用功能,更多功能請關注頭文件,在里面做了詳細的注釋;
13 如有其他疑問,請聯系技術。
下一篇:高川運動控制器固件升級方法
Copyright ?2020 深圳市高川自動化技術有限公司 版權所有 備案號:粵ICP備2022048856號




